

 QQ
QQ

通过 “逻辑性输入输出”连接输入输出部和机器人动作处理部,但在功能 方面将其分割为完全独立的功能。
各信号的操作方法也与机器人动作处理一侧不同。
编制梯形图程序时,如下所示设定编号,确保可统一指定各信号。
使用5位数值指定 “继电器编号”。该数值由以下所示的3个信息构成。
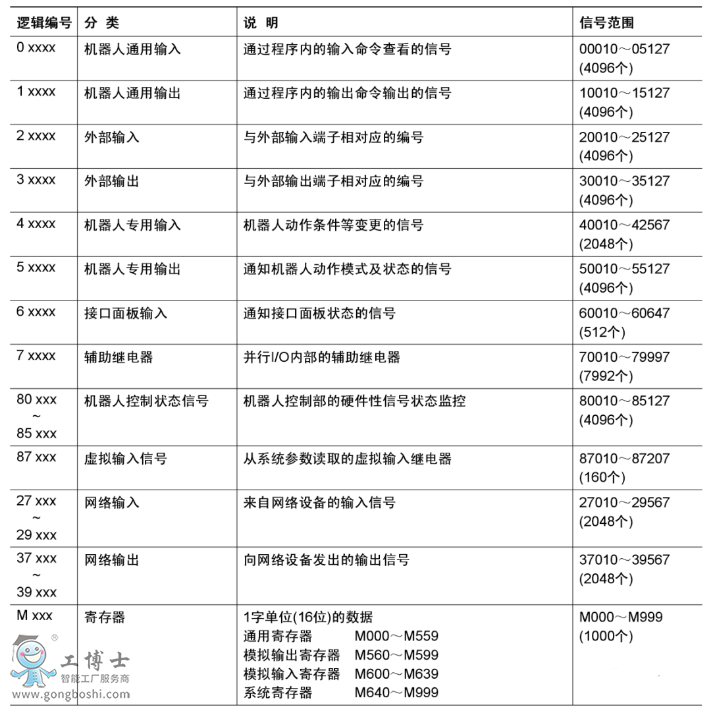
寄存器

寄存器为1字(16位)单位的数据。
通用寄存器(M000~M559)、模拟输出寄存器(M560~M599)可进行读取/ 写入。
系统寄存器(M640~***99)、模拟输入寄存器(M600~M639)为只读,数据 通过系统设定。
YRC1000 输入输出数据的分类

本文摘自 : 网络
安川机器人 安川机器人维保
寄存器为1字(16位)单位的数据。
通用寄存器(M000~M559)、模拟输出寄存器(M560~M599)可进行读取/ 写入。
系统寄存器(M640~***99)、模拟输入寄存器(M600~M639)为只读,数据 通过系统设定。
YRC1000 输入输出数据的分类
本文摘自 : 网络
安川机器人 安川机器人维保
- 下一篇:解锁无人化安川电机工厂--安川机器人
- 上一篇:解锁安川机器人虚拟仿真软件
