

 QQ
QQ
机器人的安装对其功能的发挥十分重要,特别值得注意的是基座的固定和地基能够承受机器人加减速时的动载荷以及机器人和机器人夹具的静态重量。请按照“表3-1急停时机器人的***大动载力”、“表3-2加减速时的***大动载力”对机器人进行设计和施工。另外,机器人的安装面不平整时,有可能发生机器人变形,性能受影响。
机器人安装的平面度,请确保在0.5mm以下。
基座的固定,按照3.2.1中的方法进行。
表3-1:发生急停时机器人的***人动载力
表3-2:加减速时的***人大扭矩
安装举例
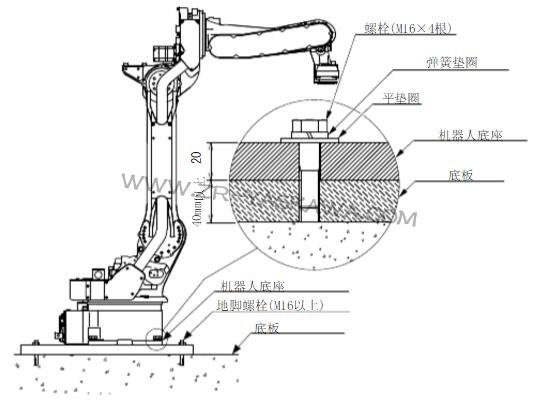
首先把底板固定在地面上、底板必须具有足够的强度和刚度,我们推荐使用底板的厚度应该为40mm以上,选用M16以上的地角螺栓把底板固定在地面上。
机器人的底座应通过其上四个安装孔用M16六角螺栓(推荐长度为50mm)
牢固的固定在地板上,为使六角螺栓在设备运行中不发生松动,请按“图3-1机器人安装举例”的方法充分固定。
图3-1:机器人安装举例
安装方式
MOTOMAN-MA1400机器人可以采用地面安装、壁挂安装和倒挂安装三种方式。壁挂安装、倒挂安装与地而安装有以下三种不同:倒挂时为YR-MA01400-A10、A11。
S轴回转范围
机器人底座固定
防坠落处理
S轴回转范围
壁挂式安装的机器人,S轴动作范围为士30°。(出厂前进行修改)
机器人底座的固定
倒挂和壁挂形式安装时,机器人底座必须使用4个M16内角螺栓(JISB
1176、性能等级12.9)用206Nm力矩扭紧固定。
防坠落措施
倒挂和壁挂安装时,为以防万一,在机器人底座上要安装防坠落保险装置。其方法请参照“图3-2防坠落方法”。
图3-2:防坠落方法
安装现场和环境
机器人安装现场必须满足以下环境条件:
运转时,周围的温度应在0~+45℃范围内
湿度较小,较干燥的场所(湿度20至80%RH,不结露。)
灰尘、粉尘、油烟、水等较少的场合
不存在易燃、腐蚀性液体及气体的场所
不受大的冲击、振动的场所(振动加速度4.9m/s2(0.5G)以下)
远离大的电器噪音源(TIG焊接装置等)的场所
安装面的平面度在0.5mm以下
本文 摘自: 网络
需要了解更多安川机器人可关注 : http://yaskawa-brobotpj.gongboshi.com/
| 水平面回转时***大扭矩 (S轴动作方向) |
3800 N·m (390 kgf·m) |
| 垂直面回转时***大扭矩 (LU轴动作方向) |
3500 N·m (357 kgf·m) |
| 加减速时水平面回转时***大力矩 (S轴动作方向) |
900N·m (93kgf·m) |
| 加减速时垂直面回转时***大力矩 (LU轴动作方向) |
1500N·m (158kgf·m) |
安装举例
首先把底板固定在地面上、底板必须具有足够的强度和刚度,我们推荐使用底板的厚度应该为40mm以上,选用M16以上的地角螺栓把底板固定在地面上。
机器人的底座应通过其上四个安装孔用M16六角螺栓(推荐长度为50mm)
牢固的固定在地板上,为使六角螺栓在设备运行中不发生松动,请按“图3-1机器人安装举例”的方法充分固定。
图3-1:机器人安装举例
安装方式
MOTOMAN-MA1400机器人可以采用地面安装、壁挂安装和倒挂安装三种方式。壁挂安装、倒挂安装与地而安装有以下三种不同:倒挂时为YR-MA01400-A10、A11。
S轴回转范围
机器人底座固定
防坠落处理
S轴回转范围
壁挂式安装的机器人,S轴动作范围为士30°。(出厂前进行修改)
机器人底座的固定
倒挂和壁挂形式安装时,机器人底座必须使用4个M16内角螺栓(JISB
1176、性能等级12.9)用206Nm力矩扭紧固定。
防坠落措施
倒挂和壁挂安装时,为以防万一,在机器人底座上要安装防坠落保险装置。其方法请参照“图3-2防坠落方法”。
图3-2:防坠落方法
安装现场和环境
机器人安装现场必须满足以下环境条件:
运转时,周围的温度应在0~+45℃范围内
湿度较小,较干燥的场所(湿度20至80%RH,不结露。)
灰尘、粉尘、油烟、水等较少的场合
不存在易燃、腐蚀性液体及气体的场所
不受大的冲击、振动的场所(振动加速度4.9m/s2(0.5G)以下)
远离大的电器噪音源(TIG焊接装置等)的场所
安装面的平面度在0.5mm以下
本文 摘自: 网络
需要了解更多安川机器人可关注 : http://yaskawa-brobotpj.gongboshi.com/
- 下一篇:安川机器人在生产线现场怎么运行?
- 上一篇:安川机器人伺服电机出现故障怎么应对?
